Take a moment and imagine a wheel rolling on a flat surface. Now think about one particular point on that rolling wheel.
What does the path of that point's movement look like? A circle? A line? A parabola? Something else?
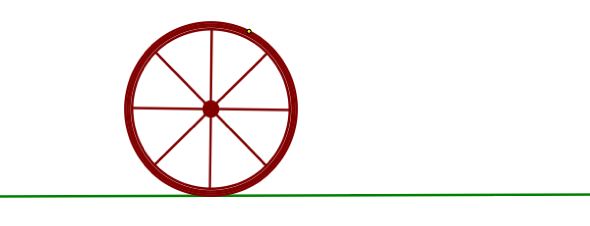
Check out the animation on this GSP file. How would you describe the point's movement?
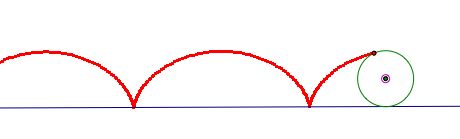
Well, the path of our point looks something like this (it's called a cycloid). I wonder if we could write function that describes this path . . .
So how does the position of our point change as time passes (as the wheel rolls). Well, the point is moving forward. But it's also circling around the wheel. To figure out how to describe our point let's look at the point's linear motion separately from it's rotational movement.
To do this we might need to turn to parametric equations. Recall that, in a parametric equation, the variables x and y are not written in terms of eacher other (like y=3x), but both are written in terms of another parameter, often denoted 't'. Here's an example.
Often it's useful to think of the parameter 't' as time, that is we can look at how both x and y change as time (or 't') increases.
To simplify matters some, let's place our well on the coordinate plane and let the radius of the wheel be 1. We'll also place our point (the one we're tracing) on the y-axis.
So how does the y-coordinate change as this wheel slides forward (remember, no rotating!). Animate the wheel in this GSP sketch to see if your conjecture is supported.
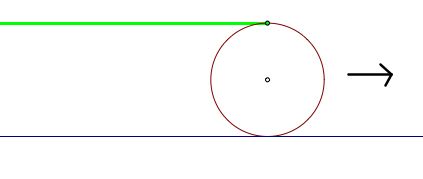
Above is the trace of our point as it moves forward. You can see that the y-coordinate of the point stays constant while the x-coordinate increases as t (or time) increases. In fact, if our point starts at x=0, it's location at some time, that is the distance the point has traveled, is related to the rate the wheel is sliding forward AND the amount of time that's passed. Check it out below.
Since our y-coordinate is not changing, we can describe the 'y' part of our parametric equation as a constant. Since we're trying to describe the motion of our wheel on the coordinate plane, look back at our diagram to figure out what the value of y is as the wheel slides. We see that
We can now write the following parametric equations to describe the linear motion of our wheel:

Now we're ready to tackle the rotational motion of the circle.
Ok, let's look back at the wheel we placed on the coordinate plane.
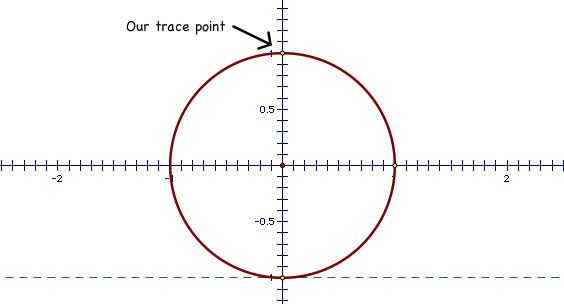
Now instead of thinking about our wheel moving forward, we want to imagine the path of our point as the wheel rotates clockwise. If you're having trouble imagining how the point moves, animate it in this GSP file. As our wheel turns, the trace point moves to every location on the unit circle, that is it's trace is precisely the unit circle. So what ways do we know of to describe this unit circle path. The most common is probably the following:
But don't forget, we can use sine and cosine to also describe the unit circle just like this.
This form looks a lot like the parametric form we used for our linear motion (where x and y are written in terms of some other quantity) so this might be the most useful way to think about the points rotational trace. Now, one problem with these equations is that they are written in terms of theta NOT 't'. Let's see if we can write theta as some value of 't'.
Well, theta represents some number of degrees that the point has moved. Like before, this movement will depend on the rate the wheel is rotating AND the how long it has been rotating (ah hah! our 't'). So we see that in fact
So now we can plug this value for theta into our equations for the unit circle and find the following parametric equation for the rotational trace of our point:
But hold on a second. As time increases, our point moves in a clockwise direction. Let's look at how our point is near the positive x-axis. As the wheel rolls, our x-coordinate decreases and our y-coordinate decreases. What direction does our parametric equation for the unit circle trace? Well, as t increases, cos(t) does decrease. However, the y-coordinate increases from 0 to 1. A problem. See if you can figure out what's happening using the diagram below.
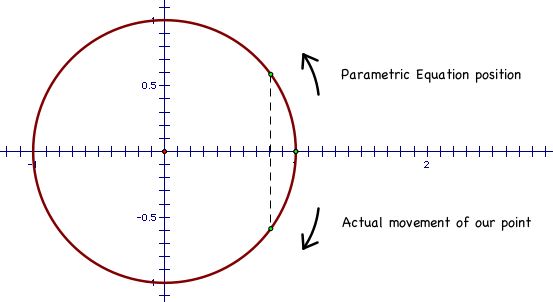
Well, the x-coordinate of where our point rotates to is the same as where our equation says it is. However, the y-coordinates are different. In fact, our parametric equation is providing us with the negative value of the actual y-coordinate of our point. To fix that, all we need to do is negate the "y" part of our rotation parametric equation. Thus we have
In both of our parametric equations we know the x and y coordinates in terms of 't' and the rate that the wheel is moving (linear rate OR rotational rate). The question is, are these two rates the same. If so, then we can combine the two parametric equations to find a description of the path of the point as the wheel rolls.
To figure this out we probably need to look a bit closer at what's happening where the rubber meets the road, so to say.

Every inch that the wheel moves forward on the road corresponds to 1 inch of movement along the circumference of the wheel. Since the wheel touches the road the distance the wheel has moved forward must always be equal to the distance covered on the wheel. Therefore the wheel is moving forward the same distance as the wheel rotates over time. Thus the rate of rotation is equal to the rate of linear movement. Whew!
We now have the following equations to describe some aspect of our point's movement:
Since our point is experiencing linear movement plus rotational movement, we can find it's coordinate by summing the effects of these two movements. So we have
So now the burning question is, does the graph of this set of equations actually look like trace of the path of our point. Remember, we need to pick some value for our rate when we graph the equation, say r=1. Check it out below.
That does look familiar!
Now the question exists, if we change the radius of the wheel how does the trace of our point change. Equally important, how do we alter our parametric equation to draw a picture of our new path. Take a moment to change the radius of the wheel in this file and see how the path changes. Below you can see the path of a small wheel (red) and a larger wheel (blue).
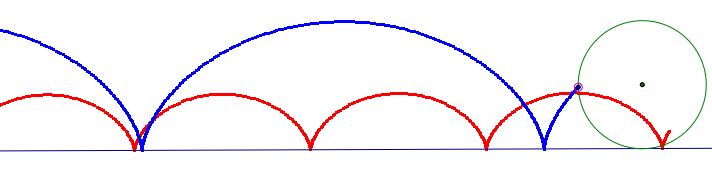
Both traces give the same general pattern but they vary in size. Let's look back at the pieces of our parametric equation and try to alter them to account for the radius of the wheel.
Our original rotational movement equation was the following:
And the basically represented our wheel with radius 1 placed on the coordinate plane. Now, if we increase the radius of our wheel, how does this affect the trace of our point?
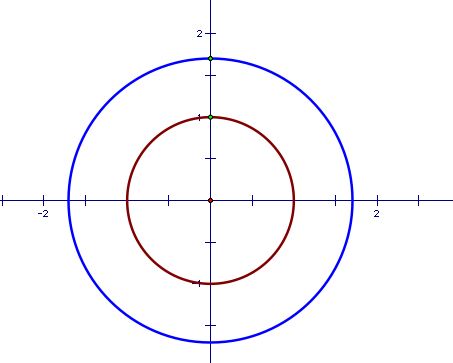
The trace of the point on our larger wheel will still be a circle, just a bigger one. In fact, the x and y coordinates will now, instead of oscillating between -1 and 1 will oscillate between -d and d (where d is the radius of the wheel). The alter our equation to reflect this, all we have to do is multiply each part by 'd,' the radius of our circle. Thus we have
Now we just need to reexamine our parametric equation for the linear movement of the wheel. Previously we found that
Look back at our bigger blue wheel. What does the y value of our point (situated on the y-axis) become? Well, this y-coordinate is now 'd' the radius of our wheel.
All we have left to analyze is how this change in radius affects the linear movement of the x-coordinate of our point. If we imaging both of our wheels rotating at the same rate (moving the same number of degrees over time), then we find that the point traveling around the blue circle is moving much more rapidly than the point on the brown circle. In fact, the . . . . . . . . .
Now our new parametric equation for linear movement is
Finally, we can write parametric equations that describe the trace of the path of our point
Try out different values for d and r in this Graphing Calculator file to see how that affects the trace of a point.